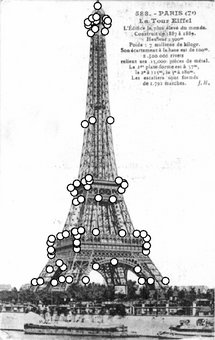
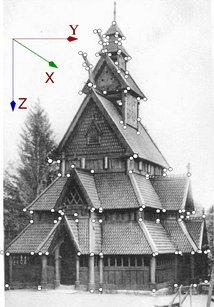
The reconstructions below are obtained from a single image (a
scanned postcard) in which some image points are identified (the white
dots) and from geometric information, in the form of known
planes,symmetries, known angles etc. From this information, the
least-squares reconstructions are computed, together with estimates of
the precision with which they are obtained.
In this work, the previous state-of-the-art, as of 2002, was improved
by:
- Using common geometric properties that where not previously
exploited, such as symmetry with respect to planes, equality of
lengths. As a consequence, reconstructions can be obtained in
situations which were not reconstructible previously.
- Allowing single- and multi- view datasets to be treated alike.
- Providing a parameterization of 3D points subject to geometric
constraints that allows to obtain the least-squares estimate using
common optimization tools.
- Providing a test to determine whether the input data defines a
unique reconstruction. This test gives a correct answer independently
of noise in the 2D points.
 |
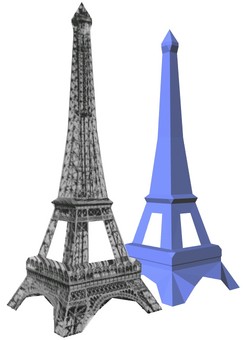 |
Eiffel Tower
The rightmost image shows the reconstruction with and without texture.
- Number of points : 70.
- Geometric information : 56 planarities and 45 known
ratios of signed lengths that express the symmetry of the tower.
- Estimated precision of reconstructed 3D points : 0.5%.
- VRML
model, short movie.
|
 |
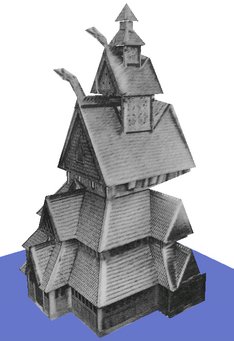 |
Folkemuseum
The rightmost image shows the reconstruction.
- Number of points : 131.
- Geometric information : 75 planes and 26 known ratios of
signed lengths.
- Estimated precision of reconstructed 3D points : 1.5%.
- VRML
model, short movie.
|
|
|
|
More information
-
The article E. Grossmann and J. Santos-Victor. Least-squares 3D
reconstruction from one or more views and geometric clues.
Computer Vision and Image Understanding, 99:151-175, 2005.
[ bib | GrossmannSantosVictor05CVIU.pdf
]
PhD Abstract
We consider the problem of tridimensional
reconstruction obtained from one or more images, when the 2D
perspective projections of 3D points of interest are available,
together with some geometric properties, such as planarities,
alignments, symmetries, known angles between directions etc. Because
these geometric properties occur mainly in man-made environments and
objects, the presented method applies mostly to these cases.
The method has two phases. In the first, the
reconstruction problem is transformed into one of linear algebra, and
the solutions to the initial problem are identified with that of the
second. Thus, examining the dimension of the space of solutions allows
to determine whether the provided information is sufficient to
uniquely define a reconstruction.
In the second phase, the maximum likelihood
reconstruction is obtained. The reconstruction problem is transformed
into a problem of unconstrained optimization by using a differential
parameterization of the 3D points subject to geometric
constraints.
These two techniques combine into a
reconstruction
method that improves upon the current state-of-the-art by offering a
great flexibility of use and by providing a reconstruction that is
statistically characterized. The method is benchmarked using
synthetic and real-world data.
Thesis supervisor :
Prof.
José Santos Victor
Jury members :
It is known [MF92,F92,H93] that Euclidean 3D reconstruction is possible from
three or more uncalibrated views. However, even though the solution to
the reconstruction problem is indeed unique, this solution is extremely
sensitive to noise in the input data. In probabilistic terms this is
reflected by the fact that the covariance matrix of the
maximum-likelihood estimator of 3D reconstuction has a high condition
number and large diagonal elements.
Geometrically unconstrained
uncalibrated 3D reconstruction
In this Image
and Vision Computing article
(a previous
version of which appeared in BMVC '98), we
show that a Gaussian error model is appropriate when the input consists
of hand-identified image points and study the effect of noise
amplitude, number and geometric disposition of cameras and number of 3D
points on the precision of the obtained maximum-likelihood estimate.
Also, we compare this precision with that of various maximum a-priori
estimators that benefit from prior knowledge on some or all of the
intrinsic camera calibration parameters. In conclusion, use more than
three images. If possible, use a probabilistic a-priori on the
intrinsic parameters. In all cases, check the covariance of your
estimate (this assumes that your reconstruction is the result of
maximizing a likelihood function, rather than an analytic solution), as
neither known calibration nor high number of cameras and points
garantee a good accuracy.
Comparison between geometrically constrained and unconstrained
uncalibrated 3D reconstruction
In this BMVC'00
article,
we show the effect of a-priori information about the geometry of the
scene on the precision of the 3D reconstruction obtained from
uncalibrated images. There have been many claims [BMV93,BB98] that the reconstruction is improved when
some geometric properties of the scene are known. However, we are not
aware of quantitative studies of this question (dear reader, tell me
if you are aware of such studies). The type of information considered
is planarity and known angles between planes. In this work,
we assume a Gaussian noise on the input and use the framework of
maximum-likelihood and maximum a-priori estimation. In conclusion,
known angles and planarities very effective at improving the precision
, while knowing only planarities is much less effective.
References
- [MF92] S.J. Maybank and O.D. Faugeras, "A theory of self-calibration of a moving
camera", Intl. J. Computer Vision, V.8, N.2, 1992, pp.123-151.
- [F92] O.D. Faugeras, "What can be seen in three dimensions with
an uncalibrated stereo rig?", proc. ECCV 1992, pp.563-578.
- [H93] R.I. Hartley, "Euclidean reconstruction from
uncalibrated views", proc. Europe-U.S. Workshop on
Invariance, 1993, pp.237-256.
- [BMV93] B. Boufama and R. Mohr and F.
Veillon, "Euclidean Constraints for
Uncalibrated Reconstruction", proc. ICCV 1993, pp. 466-470.
- [BB98] D. Bondyfalat and S. Bougnoux, "Imposing Euclidean Constraint During
Self-Calibration Processes", proc. SMILE Workshop, 1998,
pp.224-235.
Paraperspective reconstruction is a factorization-based method for 3D
reconstruction. Factorization methods are simple to implement and
mostly non-iterative methods. Because they use a parallel projection
model, their accuracy with most real-world data -produced by
perspective projection- is not great. However, the result of a
factorization method constitutes a good starting position for an
iterative perspective method and I have mostly used it as such.
As its name implies, paraperspective reconstruction uses the
more faithful paraperspective projection model instead of the
orthographic projection model used in the original factorization method
of Tomasi and Kanade [TK92]. Paraperspective
reconstruction was first proposed by Poelman and Kanade [PK94]
and this ICPR'00 article
improves over the latter by presenting a truly closed-form method for
paraperspective reconstruction.
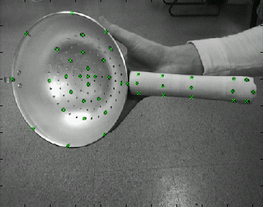
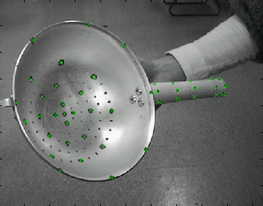
Example
reconstruction obtained with the proposed algorithm.
|
|
 |
 |
 |
Two
out of twelve views of the object. Green crosses mark tracked points.
|
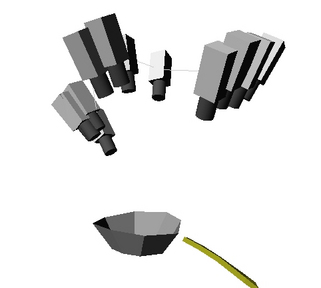
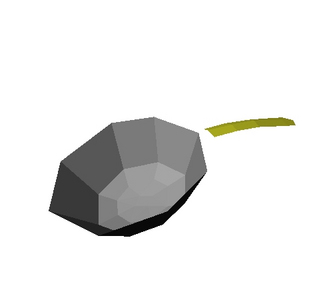
Reconstructed
object and (left) estimated camera positions. The geometric deformation
is typical of paraperspective reconstruction at short-range.
|
References
- [TK92] C. Tomasi and T.Kanade, "Shape and Motion from Image Streams under
Orthography: a Factorization Method", Intl. J. of Computer
Vision, V.9, N.2, pp.137-154, 1992.
- [PK94] C. J. Poelman, T. Kanade, "A
paraperspective factorization method for shape and motion recovery",
proc. ECCV '94, pp.97-108.
Here is a dataset
consisting in six sequences. It has been used in the BMVC'98
and IVC'00
articles mentionned above.
Each sequence has 5-10 images and the
coordinates of some points that have been manually identified and
tracked along the images. The least-squares reconstruction is included.
The data is in Octave/Matlab format. Feel free to use it for testing
your own
reconstruction algorithms.